Smart & Safe
Being completely safe is the main feature for collaborative and autonomous mobile robots (AMRs) that run in dynamic environments and work alongside humans. With an increasing demand for AMRs across all industries, it is important to deliver a system that does not compromise safety.
When discussing safety, it is important to distinguish between the robots’ features that enable autonomous and safe navigation in daily operation and safety functions that are incorporated into the robots to ensure that the robots always are safe, even if their primary system fails.
.png)
As the only AMRs on the market, the MiR500 and MiR1000 robots are also equipped with 24 proximity sensors that are placed in all corners of the robots and that are pointing towards the floor. These are detecting feet and pallets that can be below the laser scanners’ field of view. When an AMR drives, it can detect obstacles in front of it on the floor, which it will avoid thanks to its cameras, but when it goes from holding still to be moving and turning, the laser-scanners cannot detect obstacles that are placed just next to it and are below 20 cm high, such as feet and empty pallets, and hazardous situations can occur. Here, the proximity sensors of the MiR robots are applying more safety in situations that are normally not covered by any other AMR, even though this is extremely important for heavy-duty robots that can do a lot of harm if they drive over a foot.

The laser scanners are the main part of the MiR robot’s comprehensive safety and navigation system, but many other features are part of the safe and smooth daily operation of the mobile robots from MiR.
Additional navigation aid is provided by two 3D cameras mounted on the front of the robot to detect obstacles up in 1,700 mm height. With a 120° horizontal view, the robot can always see obstacles in its path. The cameras thereby detect obstacles that are under or over the safety laser scanners field of view. This allows the robots to safely maneuver around tables, for instance, which are above the laser scanner’s field of vision but shorter than the height of the robot including top module and load. Other obstacles such as wall-mounted cabinets or shelves can also be avoided.
Additional sensors in the MiR robots include accelerometer and gyroscope to sense inertial force, acceleration, and rotation; and encoders on each wheel to measure speed for accurate feedback to the laser scanners to detect if the robot are slipping on e.g. wet floors.
The protective zones of the robot are dependent of the robot’s speed. This allows the robot to safely and slowly drive very close to obstacles, and it will automatically stop if a person or obstacle comes within a few centimeters.
Finally, the robot can also be easily programmed to optimize safety. On the robot’s map, forbidden zones can be marked simply via a pc, smart phone or tablet. Other instructions, such as defining preferred paths or restricting the robot’s speed in highly trafficked areas are also easily programmed. All MiR robots include a distinctive light bar on all sides that provides color cues to communicate its status to workers, and sound cues – including beeps, horns, or any desired sound can also easily be used.
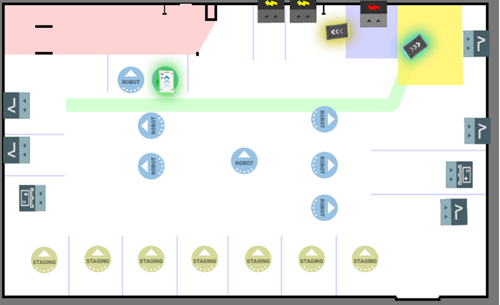
The robot’s map is easily updated with different zones, which are recognizable with different colors. In this map, you see:
The red zone = forbidden zone
The green zone = preferred zone
The yellow zone = zone where the robot makes sound
Autonomous mobile robots are carrying loads in environments with human colleagues without external safety measures. Some AMRs are small and are carrying small loads, but there’s an increase of heavy-duty AMRs that carry pallets or big loads of up to +1,000 kg (2,200 lbs). Especially this type of AMR can do harm if the usual safety system for some reason fails. An example of a potentially very hazardous situation could be if the motor controller short-circuits. If there are no additional safety functions, the AMR would e.g. run with full speed without the ability to stop, and this could end up doing a lot of harm. This is just one example of why AMRs must provide functional safety based on safety standards to address potential risks that are not addressed by inherently safe design measures, such as the sensory inputs.
Performance Level required for AMR safety systems
All safety systems are designed with the basic premise that any system has a possibility of failure. According to the most applicable safety standard for AMRs, EN 1525, the safety functions of AMRs should be designed according to Performance Level d – Category 3 of EN ISO 13849, which is made to assess safety-related control systems. The required performance level is decided as part of a risk assessment, where hazardous situations are classified into five performance levels from PL “a” (low) to PL “e” (high). The higher the risk, the higher required reliability of the safety system. When a safety system is PLd, it means that the probability of dangerous failure of the system is > 10-7 to > 10-6 times per hour – equaling less than once in 20 years. The Category refers to the type of circuit architecture used to achieve a performance level. Category 3 means that it is has a multi-channel structure that can always detect single faults.


Want to learn more about MiR safety?
Get in contact with Fast Automation.